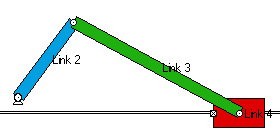
Position, Velocity, and Acceleration Analyses of Slider-Crank
Click the figure above to activate the associated video simulation file.
Software copyright © 2004 by The McGraw-Hill Companies, Inc. All rights reserved.
Info
The Matlab and Working Model files can be used to perform the position, velocity, and acceleration analyses of a slider-crank linkage and to check Homework Problems 4.9, 4.10, 6.8, 6.9, 7.5, and 7.6 of the textbook. All parameters are defined in Figures P4.2, P6.2, and P7.2 respectively.
To change the dimensions of the Working Model file, simply drag the slider control to change the link length or the orientation angle. If the link length is beyond the maximum/minimum of the slider range, adjust the range in the property table.
Source
This Working Model file is adapted from Figure P4.3 on p.199 in Design of Machinery, 3rd ed. by Norton, R.L., McGraw-Hill, 2004.
Credits
This Working Model file was first developed by Shih-Liang (Sid) Wang.